A Large-Scale Motion Dataset for Piano Playing with Bimanual Dexterous Robot Hands
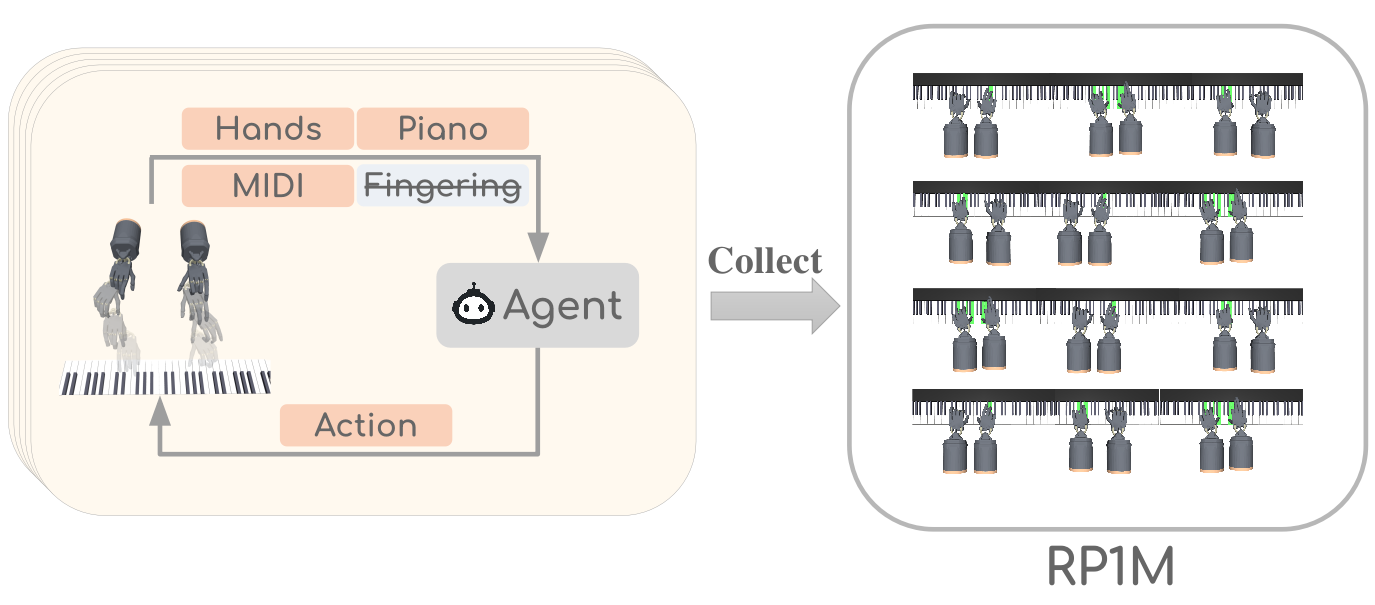
Our RP1M dataset is the first large-scale dataset of dynamic, bimanual manipulation with dexterous robot hands.
It includes bimanual robot piano playing motion data of ~1M expert trajectories covering ~2k musical pieces.
The expert trajectories in RP1M are collected via training RL agents for each of the 2k songs and roll out each policy 500 times with different random seeds. Our method does not require any human demonstrations or fingering annotations. Given the MIDI file only, fingering is discovered automatically while playing the piano.
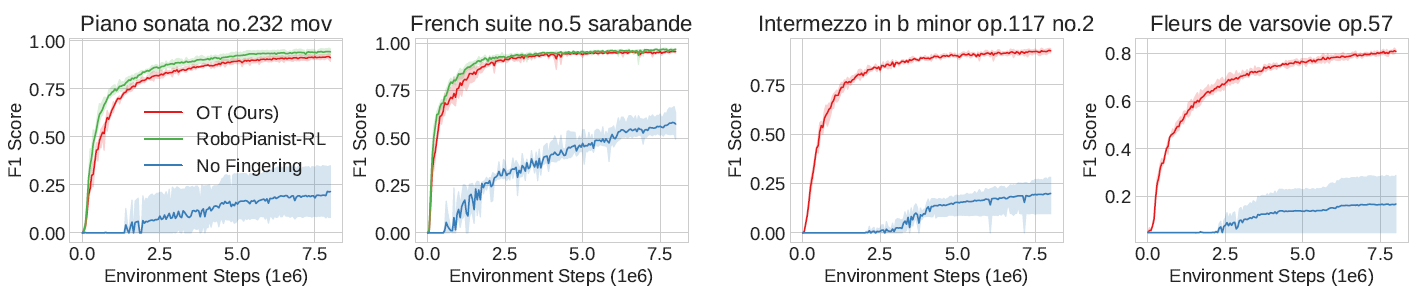
The performance of our method is on part with the one that requires human annotated fingering, and surpass the one without fingering info by a large margin.
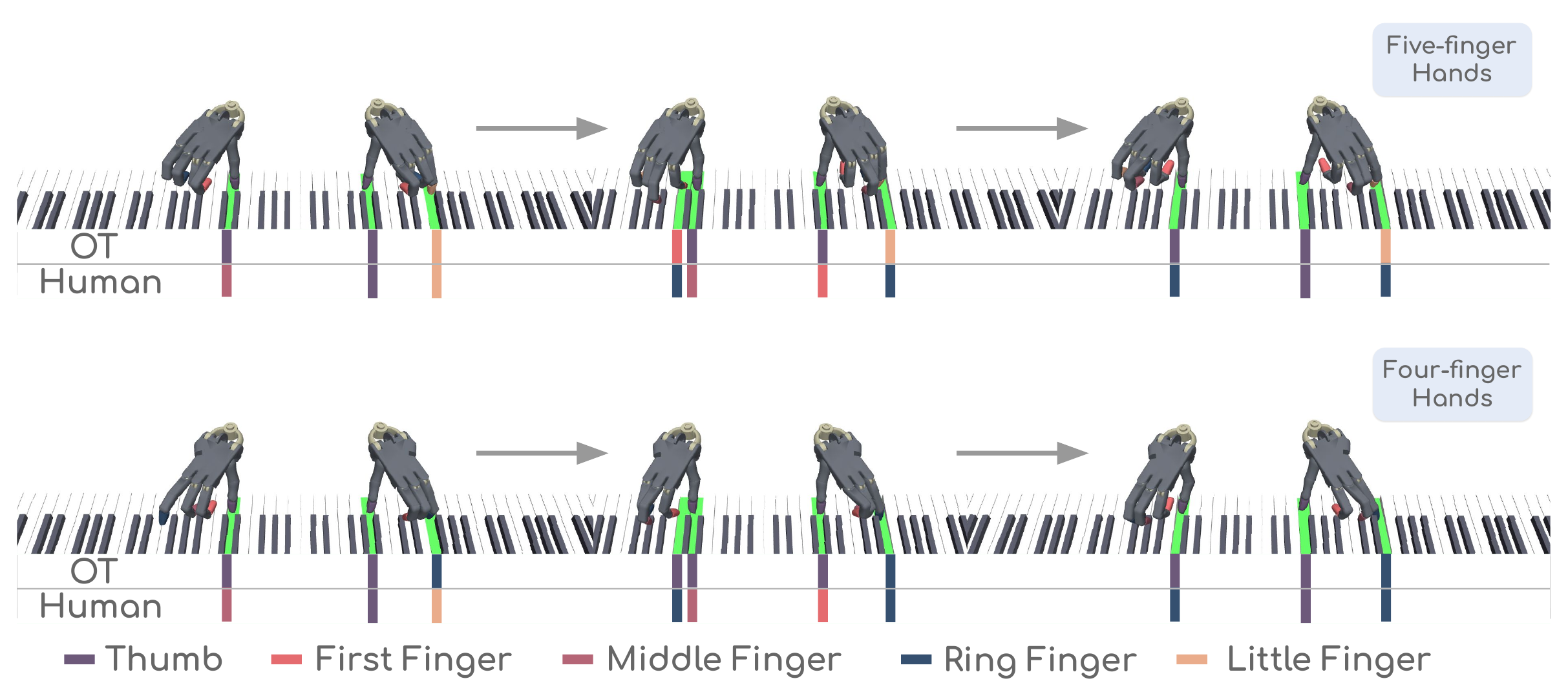
Since our approach does not require human demonstrations or fingering annotations, it can be easily transferred to robot hands with different morphologies, even other robotic platforms.
